
3D welding visual guidance
Welding is a manufacturing process and technique for joining metals or other thermoplastic materials utilizing heat, high temperature, or pressure and is widely used in industrial production.

Project Overview

The main method of industrial automated welding is currently the robot-mounted welding torch welding a specific part in a fixed position on a fixed track. If the placement is not standardized it is easy to cause defects such as missed welds, galling, arc pits, and surface porosity. There is very little equipment on the market to monitor the position of the welded part before welding, and by the time personnel notice the problem the part has already been welded and even flows into the next process, causing a significant quality impact.
Solution
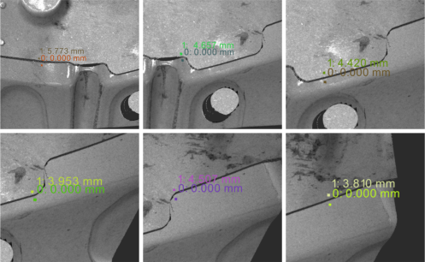
Before welding is carried out, a 3D camera is used to photograph the welded splice area to produce 3D point cloud data, monitor whether the weld is offset from the standard position and the offset is measured, and pass the offset data to the welding manipulator to correct the welding trajectory.


Company Address:Floor 1-3, South Building, Tianjin Zhihuigu Artificial Intelligence Industrial Park, No. 28 West Seventh Road, Tianjin Pilot Free Trade Zone (Airport Economic Zone)

FITOW Service Hotline
+86 22 84958362
Fitow(Tianjin) Testing Technology Co., Ltd.
WeChat public account: Fitow Tianjin Testing Technology Co., Ltd.
