
车身定位系统是一款非接触式定位车身来引导机器人实现工艺调整的视觉产品。通过多组传感器对车身上多个特征点的图像处理来解算车身在空间中的自由度位置变化量,从而引导机器人修正轨迹、精准完...

2023-10-06
涂装焊装车间车身定位系统
车身定位系统是一款非接触式定位车身来引导机器人实现工艺调整的视觉产品。通过多组传感器对车身上多个特征点的图像处理来解算车身在空间中的自由度位置变化量,从而引导机器人修正轨迹、精准完成工艺动作。

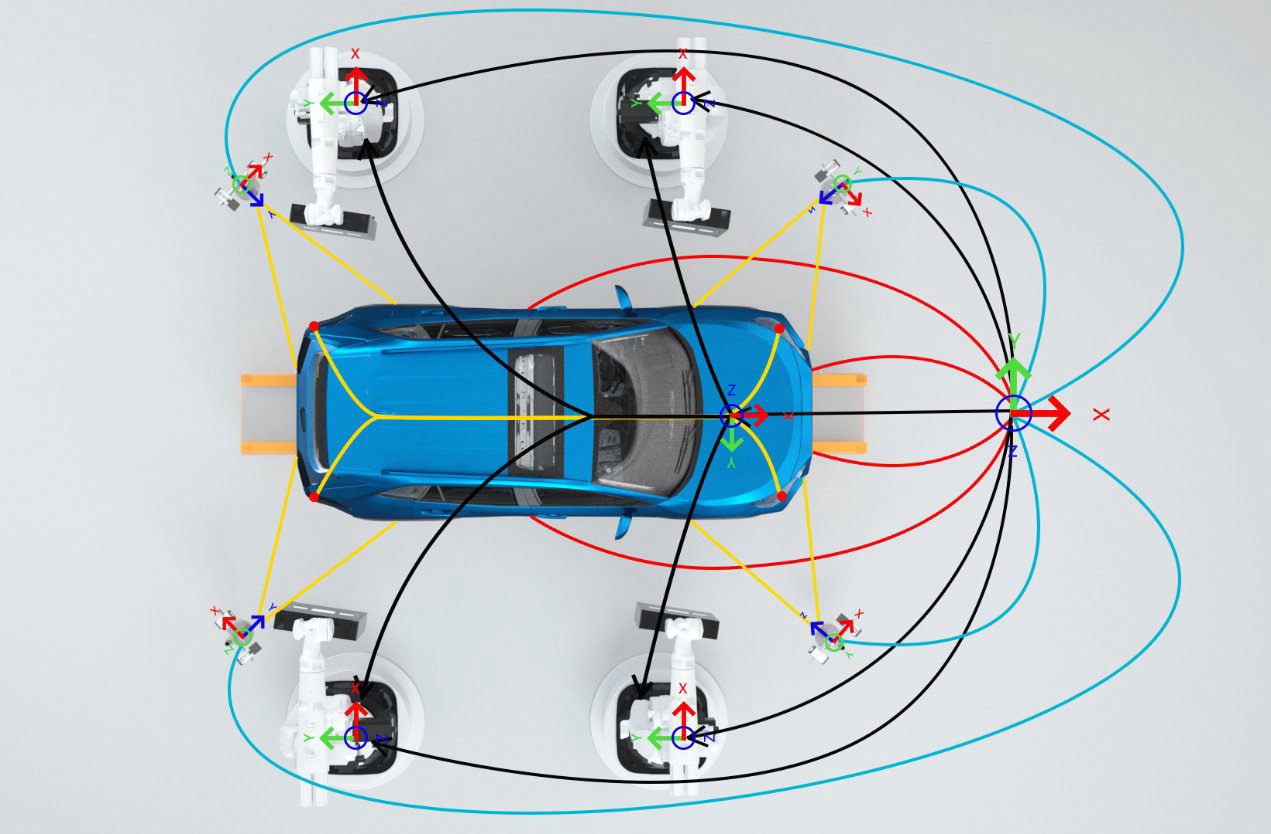
车身定位系统以激光跟踪仪作为世界坐标的原点,将工位内每一个参与工作的设备和车身特征进行测距得出相对跟踪仪的位置坐标。并且利用跟踪仪本身的功能将各设备与车身特征之间建立相对坐标关系。为定位算法提供基础数据。
定位算法通过摄像头拍摄的车身特征数据与建立世界坐标时的原始数据比较得出每辆车身的偏差值,并且可通过此值计算出每个机械臂需要纠偏的数据。
菲特车身定位系统用于整车厂涂装和焊装车间的车身精定位。解决传统夹装工具定位或传感器定位精度与速度达不到工艺标准的情况,具有以下特点:
1.速度快精度高,检测时间≤1.5秒,综合定位精度≤±1mm;
2.部署柔性高,相机多角度拍摄车身特征,工作距离1米~3米,同产线兼容多车型;
3.对产线要求低,车身到位偏差≤±70mm;
4.维护方便快捷,若误碰相机偏离原有位置,用户可自行简单操作恢复检测精度;
5.可应对恶劣环境,选配防尘罩保护镜头不受污染。
菲特车身定位系统硬件参数如下:
技术参数 | |
工作距离 | 1m~3m |
系统参数 | |
定位精度 | ≤±1mm |
定位时间 | ≤1.5s |
输出结果 | 空间三维坐标偏差值及姿态信息X,Y,Z,Rx,Ry,Rz |
环境参数 | |
工作温度 | 0℃~50℃ |
存储温度 | -20 ℃ ~70 ℃ |
湿度 | 20%~90%RH无凝结 |
电源要求 | |
电源要求 | 220V |
系统功耗 | 1000W(整套系统包含光源*4、相机*4、工控机*1) |

国家重点专精特新“小巨人”企业——菲特(天津)检测技术有限公司成立于2013年,是一家推进人工智能技术在工业领域智能化应用的企业。
企业专注于光学、人机交互、人工智能等前沿技术研发与创新,迄今已获得知识产权二百余项,独创百余个“在线级”落地应用案例,以汽车行业为起点,致力于为化纺、医药、钢铁等制造行业赋能,可提供包含质量控制,工艺监测,人工智能安全预警,智能分析以及工业垂类大模型等前沿技术,是为工业领域提供智能化解决方案的领军型研发企业。
从汽车零部件到整车厂,凡是涉及质量检测的场景都有菲特的身影,经过十年的实践先后为奔驰、奥迪、比亚迪、大众、广汽本田、红旗等知名车企提供一体化智能制造解决方案并保持长期合作,为制造企业实现真正的降本增效。2

2026-07-16

2026-07-15

2026-07-01

2026-06-24

2026-06-12
热门新闻
相关资讯:

-
 叉车防撞怎么选不踩坑?实测菲特智能防撞系统全功能 07-17,2026
叉车防撞怎么选不踩坑?实测菲特智能防撞系统全功能 07-17,2026 -
菲特叉车智能防撞系统:AI视觉+毫米波雷达融合方案,树立行业新标杆 07-09,2026
-
叉车防撞预警系统源头厂家推荐,一站式厂区AI安全监控系统 07-02,2026
-
叉车防碰撞系统采购与选型全解析:从场景到预算一站式指南 06-26,2026









