
随着工业的发展,在生产中对自动化的要求越来越高,视觉技术已被广泛引入工业机器人行业,具备视觉的工业机器人能更快、更准、更灵活地完成定位抓取、对位组装、码垛拆垛等,视觉引导是工业机器...

2023-11-07
手眼标定在工业机器人视觉定位引导系统中的应用
随着工业的发展,在生产中对自动化的要求越来越高,视觉技术已被广泛引入工业机器人行业,具备视觉的工业机器人能更快、更准、更灵活地完成定位抓取、对位组装、码垛拆垛等,视觉引导是工业机器人走向智能化的重要方式。传统的工业机器人只能按照编写好的程序做单调重复的工作,无法根据作业环境自适应调整运动轨迹,视觉引导系统赋予了机器人感知外部世界的能力。
视觉引导技术介绍
手眼标定目的及分类
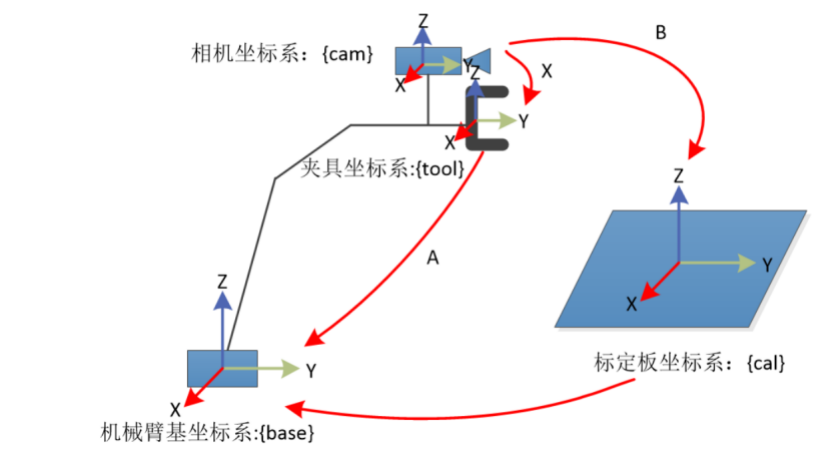
机械臂基坐标系(用base表示)
机械手工具坐标系(用tool表示)
相机坐标系(用cam表示)
标定物坐标系(通常为标定板或球,用cal表示)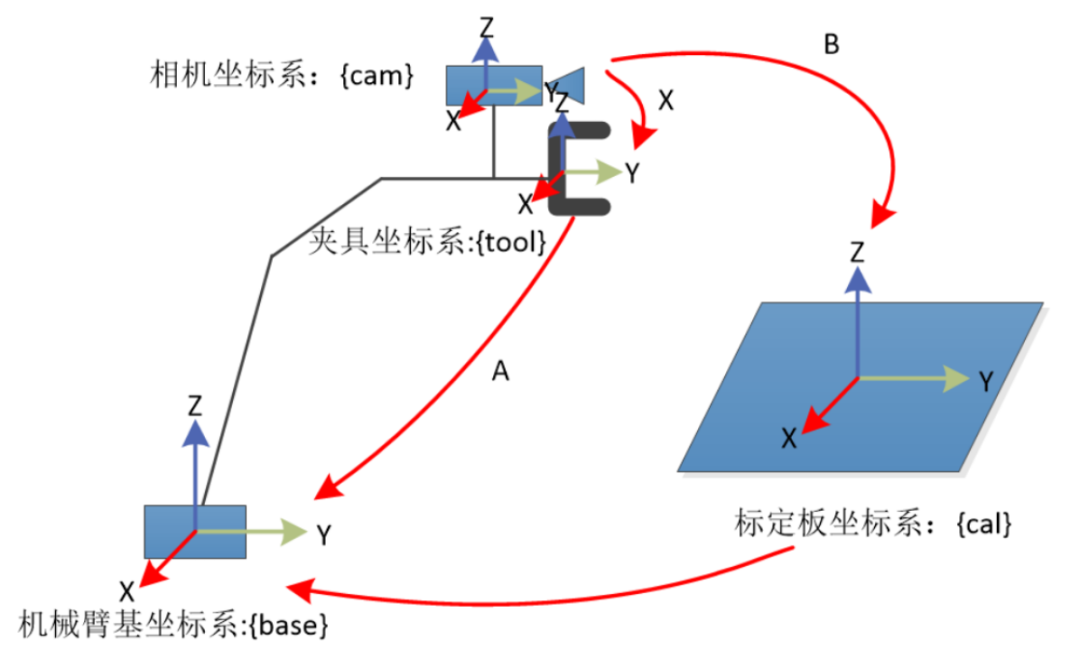
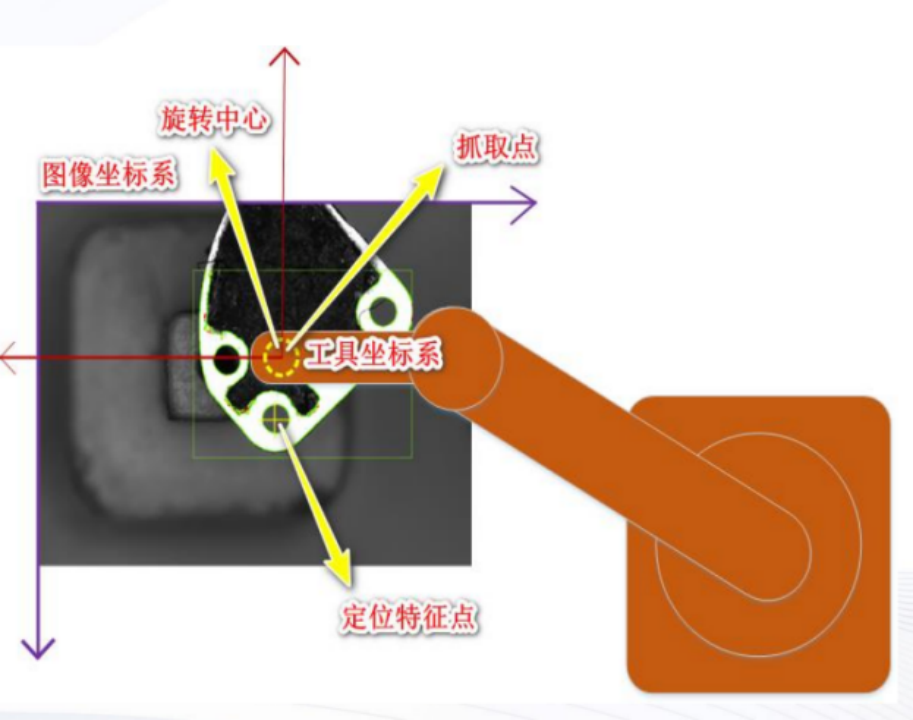
2D手眼标定
2D手眼变换中一般表达为:线性变换R和平移变换T的叠加,即为两个平面(像素平面与机器人基坐标系平面)的仿射变换。
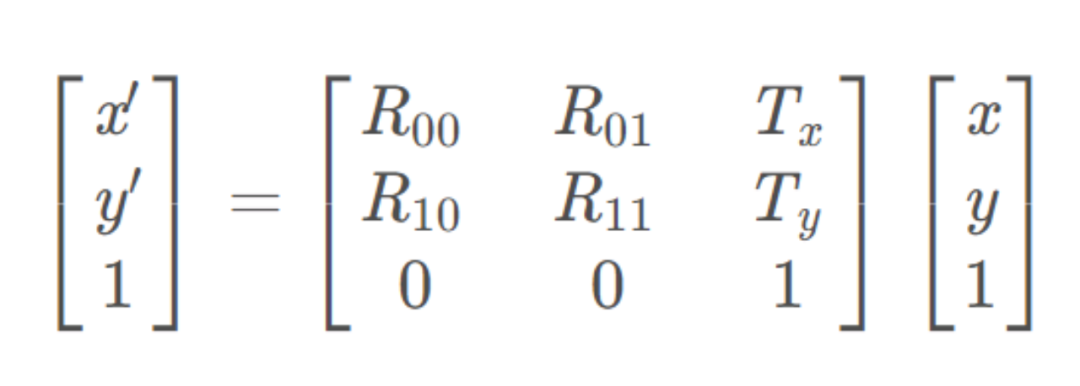
▲仿射变换实现公式
3D手眼标定
3D手眼标定则是确定相机坐标系与机械臂基坐标系或与机械臂工具坐标系之间的转换关系。通过该转换关系,3D手眼标定可以确定相机坐标系内的任意一点在机械臂基坐标系的位置,因此3D手眼标定相对于2D手眼标定具有更广阔的应用空间。
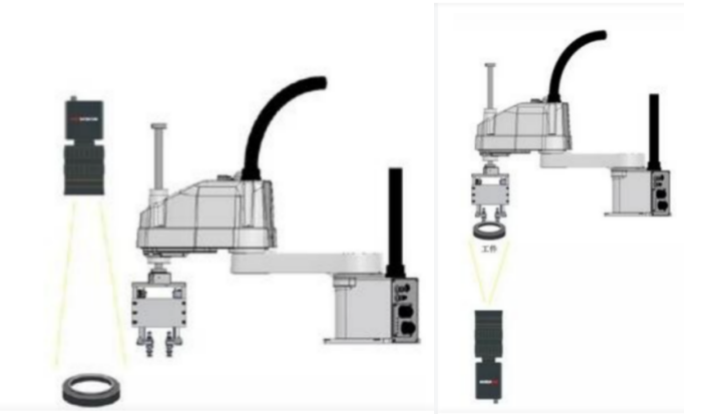
按照相机搭载方案的不同,3D手眼标定主要分为眼在手上(hand-in-eye)和眼在手外(eye-to-hand)两种形式。眼在手上方案中,相机一般搭载在机器人末端工具上,相机相对于工具的位置和姿态是固定的,此时手眼标定主要确定相机与机器人工具之间的相对位置和姿态;眼在手外方案中,相机一般安装在相对于机器人基座固定的支架上,此时手眼标定主要是确定相机与机器人基座之间的相对位置和姿态。
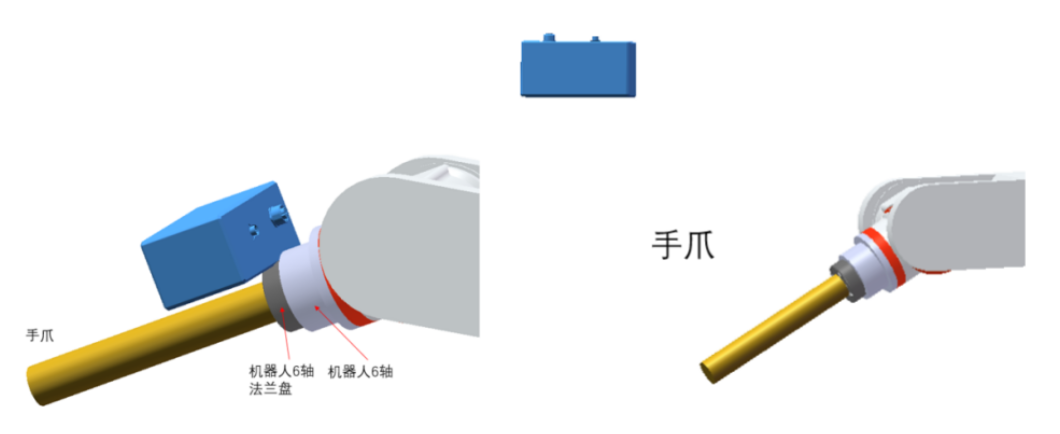
▲左侧:眼在手上 右侧:眼在手外
无论是眼在手上还是眼在手外方案的手眼标定,都可以归结为对方程AX=XB的求解。以眼在手外(hand-in-eye)方案的手眼标定举例:
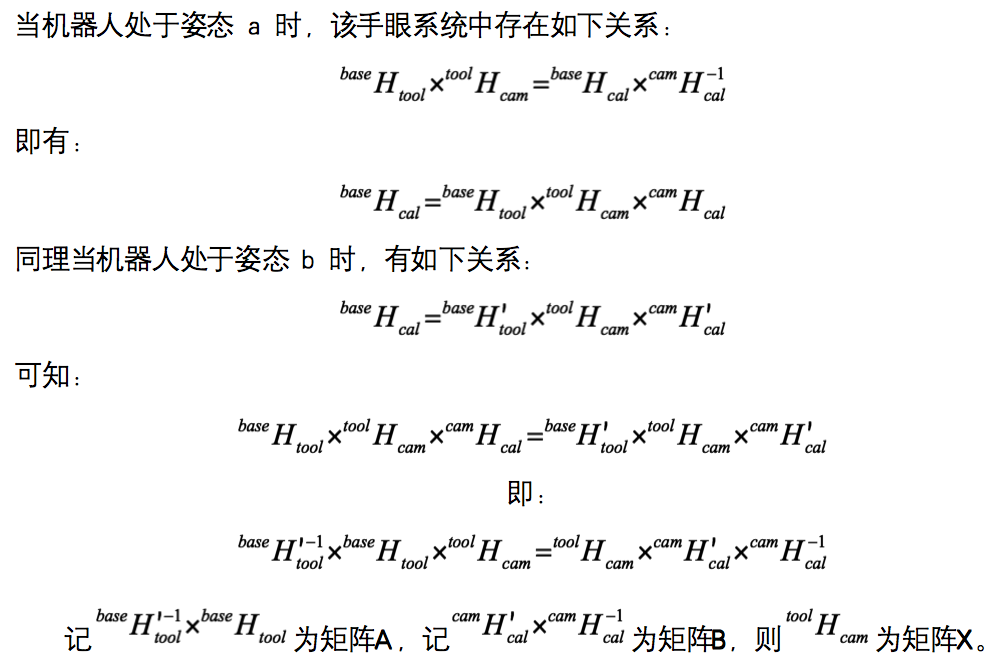
不管是eye-to-hand系统,还是eye-in-hand系统,问题的关键都是转化为求解方程AX=XB的求解,手眼标定的基本原理即如上所述,如何高效准确地完成手眼标定并应用于机器人视觉引导上,这才是未来视觉引导领域的焦点。

国家重点专精特新“小巨人”企业——菲特(天津)检测技术有限公司成立于2013年,是一家推进人工智能技术在工业领域智能化应用的企业。
企业专注于光学、人机交互、人工智能等前沿技术研发与创新,迄今已获得知识产权二百余项,独创百余个“在线级”落地应用案例,以汽车行业为起点,致力于为化纺、医药、钢铁等制造行业赋能,可提供包含质量控制,工艺监测,人工智能安全预警,智能分析以及工业垂类大模型等前沿技术,是为工业领域提供智能化解决方案的领军型研发企业。
从汽车零部件到整车厂,凡是涉及质量检测的场景都有菲特的身影,经过十年的实践先后为奔驰、奥迪、比亚迪、大众、广汽本田、红旗等知名车企提供一体化智能制造解决方案并保持长期合作,为制造企业实现真正的降本增效。2

2026-07-16

2026-07-15

2026-07-01

2026-06-24

2026-06-12
热门新闻
相关资讯:

-
 数字孪生在实际工厂中的应用 07-26,2024
数字孪生在实际工厂中的应用 07-26,2024 -
数字孪生在汽车制造中的应用原理 07-18,2024
-
数字孪生应用案例 07-18,2024
-
工业数字孪生:塑造未来工业的创新力量 07-18,2024









