
菲特3D无序抓取技术通过3D相机识别待装配零件并抓取,随后识别待装配位置,并将工件按需求装配于指定位置,降低人员目检带来的不稳定性,通过设备统一标准进行安装,减少人员使用率,提升产...

2023-09-26
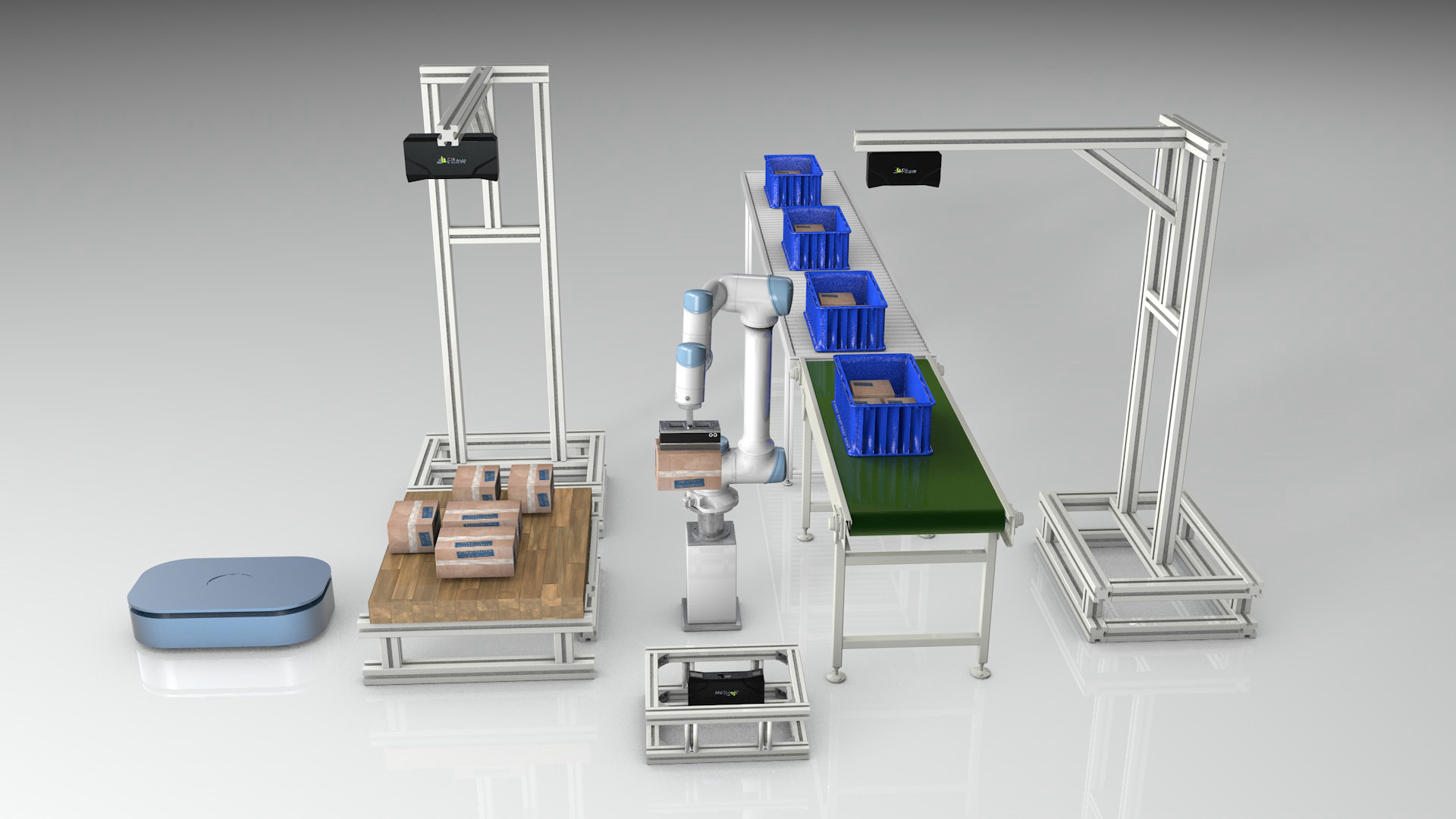
3D无序抓取视觉检测原理
目前市场传统机械行业中的上下料环节,是由流水线工人将未加工的毛坯件从料框中取出后,逐一放置于机床中进行加工,待加工完毕后再由工人将加工后的金属件放回料框中,工作量大、效率低。
菲特3D无序抓取技术通过3D相机识别待装配零件并抓取,随后识别待装配位置,并将工件按需求装配于指定位置,降低人员目检带来的不稳定性,通过设备统一标准进行安装,减少人员使用率,提升产品质量,可满足多种机器视觉的应用要求。另外,机械臂系统根据3D相机的分析结果,自动规划路径并同时避开障碍物实现对工件的抓取。对反光、暗色等金属件或随意摆放物件均可有效识别。
菲特3D无序抓取技术优势:
1.精度高
3D无序抓取系统可实现复杂高反样件的点云数据、获取物体抓取位姿信息的识别及无序抓取,抓取精度与标定精度较高。
2.鲁棒性强
针对3D无序抓取系统内部标定方法及标定板进行了创新,加入空间局部差值误差补偿,改变了结构光解码方式,解码速度快,稳定性更高。
3.具有通用性
AI检测工位多型号兼容,多产线复用,将客户的不同型号产品进行AI模型的兼容。
4.有较强硬件优势
可作为3D无序抓取系统硬件开放平台使用,也可做为监测平台使用,实现总体或分布式部署。
3D无序抓取系统也可融合AI缺陷监测,在IQC场景下实现无人化工业质检,为用户提供高性价比上料检测及码垛方案。


国家重点专精特新“小巨人”企业——菲特(天津)检测技术有限公司成立于2013年,是一家推进人工智能技术在工业领域智能化应用的企业。
企业专注于光学、人机交互、人工智能等前沿技术研发与创新,迄今已获得知识产权二百余项,独创百余个“在线级”落地应用案例,以汽车行业为起点,致力于为化纺、医药、钢铁等制造行业赋能,可提供包含质量控制,工艺监测,人工智能安全预警,智能分析以及工业垂类大模型等前沿技术,是为工业领域提供智能化解决方案的领军型研发企业。
从汽车零部件到整车厂,凡是涉及质量检测的场景都有菲特的身影,经过十年的实践先后为奔驰、奥迪、比亚迪、大众、广汽本田、红旗等知名车企提供一体化智能制造解决方案并保持长期合作,为制造企业实现真正的降本增效。2

2026-07-28

2026-07-16

2026-07-15

2026-07-01

2026-06-24
热门新闻
相关资讯:

-
 WMS仓库管理系统带来的多重好处 04-18,2024
WMS仓库管理系统带来的多重好处 04-18,2024 -
3D无序抓取视觉检测原理 09-26,2023
-
3D无序抓取视觉检测设备特点及优势 09-25,2023
-
机器视觉行业的发展现状及未来趋势 09-04,2023







